O que são juntas Roboticas?
Índice
- O que são juntas Roboticas?
- Qual é a diferença entre uma junta prismática é rotativa?
- Quais são os tipos de juntas rotativas utilizadas na anatomia de um braço mecânico?
- Como funcionam as Juntas de rotação?
- Quais são os tipos de juntas?
- Como são as Juntas mecânicas?
- Quais são os assuntos relacionados à robótica?
O que são juntas Roboticas?
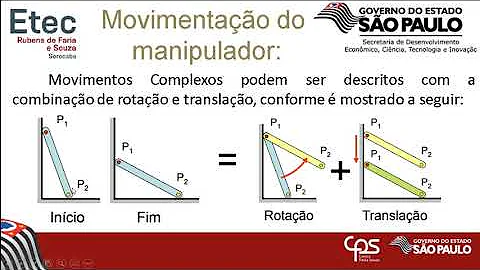
As juntas de um manipulador robótico permitem que esse se mova em várias posições. Além disso, podem ser de diferentes tipos, os mais comuns são: junta pris- mática ou linear, junta rotacional, junta esférica, junta cilíndrica, junta planar e junta parafuso (CARRARA, 2004).
Qual é a diferença entre uma junta prismática é rotativa?
A junta prismática ou linear: Move em linha reta. São compostas de duas hastes que deslizam entre si; A junta rotacional: Gira em torno de uma linha imaginaria estacionaria chamada de eixo de rotação.
Quais são os tipos de juntas rotativas utilizadas na anatomia de um braço mecânico?
Tem-se assim as seguintes juntas rotativas: - Rotativa de torção ou torcional T: Os elos de entrada e de saída tem a mesma direção do eixo de rotação da junta. - Rotativa rotacional R: Os elos de entrada e de saída são perpendiculares ao eixo de rotação da junta.
Como funcionam as Juntas de rotação?
- Mário Luiz Tronco Juntas de Rotação (revolução) “R” o movimento de dois elos (hastes) adjacentes é de rotação Robôs Industriais –conceitos, classificação, aplicação e programação Mário Luiz Tronco Junta Esférica (rótula): permite a rotação em torno de três eixos simultaneamente
Quais são os tipos de juntas?
- Juntas: compõem o par cinemático formado por dois elos adjacentes. Dois tipos básicos: - junta de rotação; - junta prismática (de translação) O número de juntas equivale ao número de graus de liberdade do manipulador Robôs Industriais –conceitos, classificação, aplicação e programação
Como são as Juntas mecânicas?
- Juntas mecânicas, também conhecidas como juntas automotivas. Na mecânica, uma junta é um objeto que permite o acoplamento mecânico entre dois objetos, preenchendo o espaço entre eles, permitindo a sua fixação com firmeza e impedindo, quando estes transportam fluidos, a fuga do conteúdo para o exterior.
Quais são os assuntos relacionados à robótica?
- A conhecimento desses assuntos é essencial para a compreensão e aplicação de outros tópicos relacionados à robótica (locomoção, visão, programação, sensoriamento, manipulação, I.A., CAD, CAM). Segundo Spong & Vidyasagar (1989), o primeiro curso na área de robótica deve começar com estes três assuntos: -Cinemática; -Dinâmica; -Controle.